выход 1. Введение
1.1 Общие замечания
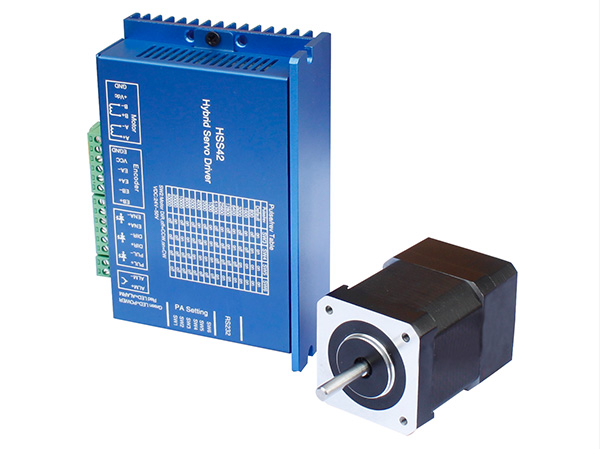
3HS2260 - гибридный мощный шаговый сервопривод. Он подходит для двигателей с трехфазным движением 86 (нма34) и 110 (нма42). по сравнению с традиционным разомкнутым кольцом шаговый привод, шаговый сервопривод полностью избегает шагового шагового отказа двигателя, его скоростной момент падения значительно ниже, чем за разомкнутым кольцом шаговый привод, что значительно повышает производительность и крутящий момент двигателя. приводной ток можно автоматически управлять по нагрузке, эффективно подавлять повышение температуры двигателя, продлить срок службы двигателя. встроенное положение и выход аварийной сигнализации удобно для вышестоящей машины контролировать состояние работы двигателя. функция оповещения об ошибках в гипербитах обеспечивает безопасную работу устройства. Это идеальная замена и модернизация традиционного привода с открытым кольцом, а также некоторые функции сервосистемы переменного тока, цена только половина системы переменного тока.
1.2 особенности
★ 32 - битный метод управления DSP и векторным замыканием
★ точность позиционирования
★ увеличение выходного крутящего момента и скорости работы двигателя
★ техника управления переменным током, торможение повышения температуры двигателя
★ адаптироваться к условиям механической нагрузки (включая шкив с низкой жёсткостью), нет необходимости регулировать параметр усиления
★ движение стабильное и надежное, маленькая вибрация, а также значительно улучшенные замедляющие свойства.
★ способность к покою и отсутствию вибрации при нулевой скорости
★ комбинированный сервомотор с тремя фазами 86 (нма34) и 110 (нма42)
★ максимальная частота импульсов скачка
★ микрошаговый импульс 200 - 65535 / вращение
★ диапазон напряжения AC150 - 220V
★ защита от перенапряжения и перенапряжения
★ шестипозиционная цифровая лампа показывает, что легко установить параметры и контролировать ход двигателя
1.3 применение
автоматы и инструменты, требующие большого крутящего момента, такие, как гравировальные машины, швейные машины, ножницы для снятия проволоки, маркировочные машины, резательные машины, лазерные графопостроительные машины, графопостроитель, станки с цифровым управлением, автоматическое сборочное оборудование и т.д. нейтральная энергия в оборудовании хорошая, малый шум, высокая скорость.
технические показатели
входной напряжение | AC150 ~ 220V (обычно используется 220VAC) |
выход тока | пик 6. 0A (переменная тока на основе нагрузки) |
ввод логического тока | 7 ~ 20mA |
частота | 0 ~ 200khz |
подходящий мотор | трехфазный комбинированный сервомотор |
разрешение кодера | 1000 |
сопротивление изоляции | > = 500M Омега |
2.2 экологические показатели
способ охлаждения | естественное или принудительное воздушное охлаждение |
условия работы | Предотвращение пыли, масляного тумана и коррозионных газов |
рабочая температура | 0 ~ 50 °C |
влажность | относительная влажность 40 ~ 90% |
вибрация | максимальная скорость 5.9m / s 2 |
Среда памяти | - 20°C ~ 65°C |
вес | около 1500г |
2.3 механические характеристики

интерфейс порта
3. 1 порт интерфейса питания 1
порт | символ | Определения | Замечания |
1 | L | подключение к питанию электродвигателя 220 переменный ток | |
2 | N | ||
3 | Северная Каролина | не подключаться | |
4 | BR | тормозное сопротивление | внешнее торможение соединение сопротивлением между бр и П + |
5 | P + | напряжение шины постоянного тока |
3. 2 порт интерфейса питания 2
порт | символ | Определения | NEMA34 | NEMA42 |
1 | U | порт соединения двигателя | красный | чёрный |
2 | V | порт соединения двигателя V | чёрный | бурый |
3 | W | порт соединения двигателя W | синий | синий |
4 | физкультура | поверхность земли | жёлтый | жёлтый |
5 | L | питание контроллера до 220VAC | диапазон AC150 - 220V | |
6 | N | |||
3.3 порт интерфейса контрольного сигнала (44 штыря DB)
порт | символ | Определения | Замечания |
3 | Пур + | импульсный вход | |
4 | Пур | вход импульсных сигналов - | |
5 | дир + | вход курсового сигнала + | |
6 | дир | вход курсового сигнала - | |
7 | милостыня | выход аварийного сигнала + | |
8 | милостыня | выход аварийного сигнала - | |
9 | превозносить | выход сигналов положения | |
10 | ожидание | выход сигналов положения - | |
11 | Эна + | Включить ввод сигнала + | |
12 | Эна | Включить вход сигнала - | |
23 | костный артрит | выход кодера | кодировщик сигналов A, B, Z привод дифференциала (26LS31) выход, не изолированный выход. если двигатель только A, B - 2 кодер канала, игнорируйте Z канал. |
24 | костный артрит | ||
25 | OB + | выход кодера B | |
26 | OB | ||
27 | оз + | выход кодера Z | |
28 | оз |
29 | CZ | кодирующий концентратор Z выход | |
30 | GND | поверхность земли |
3.3.1 порт интерфейса вывода сигналов (Pend and ALM)
PED и ALM - выходной канал используют оптические связи даррингтона, которые могут быть соединены с реле или оптической связью. Просьба обратить внимание на следующие моменты:
★ используйте питание для автоответчика или оптической связи, если питание не подключено, диск будет сожжен.
★ максимальный уровень мощности - 25 вт, максимальный ток - 50 мA.
★ если использовать такие чувствительные нагрузки, как реле, диод должен быть соединен с сенсорной нагрузкой, а если диод имеет обратную полярность, то привод будет поврежден.
★ при запуске давление упало примерно до 1V, что не удовлетворяет требованиям низкого уровня TTL и поэтому не может быть соединено с ток TTL.

3.3.2 порт интерфейса ввода сигналов (PUL, DIR, ENA)
★ соединение разностных сигналов

★ соединение с открытым анодом

★ соединение с общим катодом

вход 5V - сигнала. если ввести сигнал 12V, необходимо подключить дополнительный 1 к Омега - резистор. если вы введёте сигнал 24V, потребуется подключить дополнительный 2K Омега - резистор.
порт интерфейса ввода сигналов кодирующего устройства (15 швов DB)
порт | символ | Определения | Замечания |
1 | EA + | кодер A + ввод | если бы двигатель был только A, B - 2 кодер канала, игнорируйте Z канал. |
11 | EA - | вход кодера A | |
2 | электронный луч | вход кодера B + | |
12 | электронный луч | вход кодера B | |
7 | Эз | вход кодера Z + | |
8 | Эз | вход кодера Z | |
13 | VCC | + 5 вольт | |
3 | GND | поверхность земли |
порт интерфейса RS232
порт | символ | Определения |
1 | Северная Каролина | не подключаться |
2 | + 5 вольт | для внешнего HISU |
3 | TxD | порт передачи RS232 |
4 | GND | поверхность земли |
5 | RxD | порт приема RS232 |
6 | Северная Каролина | не подключаться |
подключение
4.1 Типовая схема соединений

Параметры
5.1 параметры
пароль | Определения | Сфера применения | значение по умолчанию | Замечания |
PA0 | индикатор включения | 0 ~ 7 | 0 | |
PA1 | выбор режима управления | 0 ~ 1 | 1 | - открыть кольцо, 1 = замкнутое кольцо |
PA2 | токовый контур | 1000 | запретить изменение | |
PA3 | токовое кольцо KI | 200 | запретить изменение | |
PA4 | позиционный контур | 0 ~ 1000 | 300 | |
PA5 | кольцо скоростей Kp | 0 ~ 1000 | 400 | |
PA6 | кольцо скоростей | 0 ~ 300 | 80 |
PA7 | Настройка миниатюр | 200 ~ 65535 | 4000 | |
PA8 | разрешение кодера | 4000 | 1000 строк (4) | |
PA9 | предел погрешности положения | 40 ~ 65535 | 1000 | |
PA10 | Сохранить текущий процент | 0 ~ 80 | 30 | В тыс. |
PA11 | замкнутый ток процент | 1 ~ 80 | 60 | В тыс. |
PA12 | электромашинный выбор | 0-2 | 0 | без выбора |
Стр. | время фильтрации | 0 ~ 1500 | 60 | единица измерения: 66,7 μs |
PA14 | уровень включения | 0 / 1 | 1 | |
Стр. 15 | уровень оповещения | 0 / 1 | 0 | |
Стр. | выбор режима импульсов | 0 / 1 | 0 | 0 - PUL / DIR 1 - CW / CCW |
Стр. 17 | край импульса | 0 / 1 | 0 | |
PA18 | направление вращения шпинделя | 0 / 1 | 0 | |
Стр. | скорость пробега | 1 ~ 600 | 120 | ед. |
PA20 | элемент Ждущего режима | 0 / 1 | 0 | |
PA21 | висячий нивелир | 0 / 1 | 0 | |
PA22 | разгон | 1 ~ 2000 | 200 | в: r / s ^ 2 |
Стр. 23 | замедлять | 1 ~ 2000 | 200 | в: r / s ^ 2 |
5.2 описание параметров
пароль | Определения | описание | Сфера применения |
PA0 | индикатор включения | При включении драйвера дисплей дисплея: ★ 0: Ошибка привязки ★ 1: скорость двигателя ★ 2: заданная скорость ★ импульс обратной связи ★ 4: заданный импульс ★ 5: заданный ток ★ 6: код ошибки ★ напряжение шины | 0 ~ 7 |
PA1 | выбор режима управления | ★ 0: режим разомкнутого кольца: принято выходной ступенчатый порт, двигатель работает с кольцом под контролем водителя. электрический ток зависит от времени ожидания текущий (PA10) ★ 1: замкнутый режим: приём Оба эти сигнала получены от входного сигнала порт и кодер, электродвигатель положение закрыто | 0 ~ 1 |
водитель. электрический ток автоматика изменение нагрузки | |||
PA2 | токовый контур | запретить изменение | |
PA3 | токовое кольцо KI | запретить изменение | |
PA4 | позиционный контур | ★ Чем выше значение, тем выше значение усиление и большая жесткость, и запаздывание в том же положении частота командных импульсов. Но ценность слишком велика, что может привести колеблющаяся нестабильная система. значение Настройки зависят от нагрузки. | 0 ~ 1000 |
PA5 | кольцо скоростей Kp | 0-1000 | |
PA6 | кольцо скоростей | 0-300 | |
PA7 | Настройка миниатюр | 200-65535 | |
PA8 | разрешение кодера | ★ линия кодера 1000, PA8 значение по умолчанию 4 раза превышает значение кодера нитка | |
PA9 | предел погрешности положения | ★ в замкнутом и точечном режиме, если ошибка положения Если значение, пилот должен войти в положение тревога. | 40 ~ 65535 |
PA10 | удерживающий ток | ★ удерживающий ток = заданное значение значение 100MA | 0 ~ 80 |
PA11 | замкнутый ток | ★ замкнутый ток = заданное значение значение 100MA | 1 ~ 80 |
PA12 | электромашинный выбор | Нет необходимости выбор | |
Стр. | время фильтрации | время фильтрации = установленное значение * | 0-1500 |
PA14 | уровень включения | ★ 0: входной момент оптической связи отключение транзистора, отключение электродвигателя мочь время оптической связи на входе транзисторный ввод бесплатно. ★ 1: входной период оптической связи транзисторный ввод мочь время оптической связи на входе транзистор отключен (выключен), двигатель свободен. | 0 ~ 1 |
Стр. 15 | уровень оповещения | ★ 0: напоминание при выходе пропускание транзистора; Когда? нормальная работа, выходная оптическая связь Закрытие транзистора ★ 1: при напоминании, выход светосвязи Закрытие транзистора; Когда? | 0 ~ 1 |
нормальная работа, выходная оптическая связь включение транзистора | |||
Стр. | выбор режима импульсов | ★ 0: режим импульса / направления ★ 1: против часовой стрелки / против часовой стрелки | 0 ~ 1 |
Стр. 17 | край импульса | ★ 0: нормально ★ 1: ввод командного импульса в обратном направлении полярность | 0 ~ 1 |
PA18 | направление вращения шпинделя | ★ 0: вращение двигателя по часовой стрелке ★ 1: вращение против часовой стрелки | 0 ~ 1 |
Стр. | скорость пробега | 1 ~ 600 | |
PA20 | элемент Ждущего режима | ★ 0: PEND как позиционный выходной сигнал. ★ 1: PNED как выходной сигнал тормоза. | 0 ~ 1 |
PA21 | висячий нивелир | ★ 0: позиционирование или торможение Хорошо, выходной фототранзистор включать (проводить) электричество другой выход выключение фототранзистора (отключение) ★ 1: позиционирование или торможение Хорошо, выходной фототранзистор отрезать другой выход Открытие фототранзистора (проводит электричество) | 0 ~ 1 |
PA22 | разгон | в: r / s ^ 2 | 1-2000 |
Стр. 23 | замедлять | в: r / s ^ 2 | 1-2000 |
функция оповещения
Настройка напоминания
Alm - код | определение напоминания @ info: whatsthis | описание |
-- | работа нормальная | |
1 | перетекание | электрический ток слишком большой |
2 | перенапряжение | избыточное напряжение питания основной цепи |
3 | ошибка отклонения положения | отклонение места больше заданного. |
4 | ошибка EPROM | ошибка EPROM |
6.2 методы обработки напоминаний
Alm - код | определение напоминания @ info: whatsthis | Обоснование | метод обработки |
1 | перетекание | привод U, V и W короткое замыкание. | Проверь провод. |
Проблема приземления | Проверь землю. | ||
разрушение электроизоляции | поменять новый мотор. | ||
Водитель ранен | поменять новый водитель. |
2 | перенапряжение | когда питание открывается, напряжение слишком высокое или слишком высокое ниже. | контрольный вход власть. |
неправильное включение тормозного резистора при аварийном отключении Мотор работает. | перевязка. | ||
тормозное сопротивление или тормозной транзистор повреждено. | поменять новый водитель. | ||
3 | ошибка отклонения положения | При включении управления питанием вверх, панель повреждена. | поменять новый водитель. |
если ошибка двигателя U, V и W Ошибка подключения или кодера отвинти, мотор сломается обратный ход работа | перевязка. | ||
кодер повреждён | поменять новый водитель. | ||
величина отклонения положения диапазон слишком мал. | прибавлять отклонение положения диапазон значений. | ||
позиционный контур | прибавлять позиционный контур ценности. | ||
не хватает крутящего момента. | уменьшить нагрузку или менять высоту Крути мотор. | ||
командный импульс слишком высоко. | уменьшение частота. | ||
4 | ошибка EPROM | чип или плата недоступна повреждено. | поменять новый водитель. |
в этом процессе есть помехи Процесс чтения и чтения Пиши EPROM. | Восстановить значение по умолчанию Параметры. |
мониторы и панели
панель состоит из 6 дисплеев и 5 кнопок
включительно ←、↑、↓、 S (класс), ENT.
раз ←’: выход или отмена
раз ↑’: Увеличить или
раз ↓’: уменьшить или ранее
"с": цифра левого сдвига

ввод или подтверждение
Показать главное меню
Выберите режим операции из главного меню. существует четыре режима: режим контроля, параметры, Управление параметрами и режим точечного перемещения. нажимать кнопку ↑ и ↓ чтобы изменить режим, нажмите Ent, чтобы войти в подменю, нажмите Ent ← вернуться в главное меню.

Показать подменю
7.2.1 режим контроля
Выберите "dp -", нажмите Ent для ввода режима мониторинга. в 8 показываемых состояниях нажмите кнопку ↑ и ↓ для выбора статуса нажмите кнопку ENT, чтобы показать точное значение.

7.2.2 параметры
Выберите из главного меню "PA -", нажмите Ent для ввода режима параметров. PA01 - PA23 содержит 23 параметрических кода, нажимая кнопку ↑ и ↓ чтобы выбрать код параметра, нажмите кнопку ENT, чтобы показать значение параметра. нажимать кнопку ↑ и ↓ можно изменить значение. кнопки S могут оставлять числа, а затем нажать кнопку ↑ и ↓ Увеличить или уменьшить число вспышек. нажатие кнопки ENT может подтвердить изменения. Если значение не выполнено, нажмите кнопку ENT, а кнопку ENT. ← Вернись к первоначальной стоимости.

7.2.3 Управление параметрами
Управление параметрами осуществляется главным образом между настройками параметров и операциями EPROM. Выберите из главного меню "EE -", нажмите Ent для перехода в режим управления параметрами. Существуют три модели: EE Set, EE rd и EE DEF.
EE Set: "запись параметров" означает запись параметров в область EPROM. если пользователь только изменяет параметры, не записывая их в область EPROM, то пересмотренные параметры не будут сохранены и при следующем подключении будут восстановлены исходные значения. Но если параметр записывается в область ERPOM, то следующее подключение будет изменено.
EE rd: "чтение параметров" означает чтение параметров в области EPROM в область RAM. этот процесс будет осуществляться после подключения. вначале значение параметра RAM было таким же, как и в области EPROM. Но когда пользователь изменяет параметр, он изменяет значение параметра RAM. если пользователь не удовлетворен изменёнными значениями или их значение нарушено, операция чтения параметров может быть вновь прочитана в пространстве RAM.
EE DEF: "Сброс установки" означает возвращение значения по умолчанию в пространство RAM, а также в область EPROM. пользователь может использовать эту операцию, если он не в состоянии нормально работать.
Пример EE Set: выберите режим EE Set, нажмите на кнопку ENT и Продемонстрируйте на экране "start", что означает, что параметры записываются в EPROM через 1 - 2 секунды, а если операция EE Set будет успешной, то на экране будет показан "завершение", а если операция не будет выполнена, то на экране дисплея будет показана "ошибка". нажимать кнопку ← можно вернуться в главное меню.

7.2.4 точечная модель
режим перемещения точки: Настройка PA1 = 2, режим управления - режим перемещения точки. нажав PA19, чтобы установить скорость пробега,установить скорость бега и замедление через PA22 и PA23. Выберите медленный бегглавное меню. нажимать кнопку ↑ удерживание, двигатель будет работать со скоростью точечного движения, освобождениепуговица ↑, двигатель остановится и сохранит скорость 0. нажимать кнопку ↓ мотор, моторПереверните назад. кнопка расцепления ↓ , двигатель остановится и сохранит скорость 0.
сайт
продукт
связаться с нами
мобильный телефон